John Hopkins ir Stanfordo robotai mokosi chirurgijos žiūrėdami vaizdo įrašus

Mokslininkai iš Johno Hopkinso universiteto ir Stanfordo universitetų atskleidė išsamią informaciją apie tai, kaip jie moko robotus su vaizdo įrašais, kad jie atliktų chirurgines užduotis, o tai galėtų būti reikšmingas žingsnis medicinos robotikos srityje.
Robotika chirurgijoje nėra naujiena, įvairiais atvejais naudojama daugelį metų. Tačiau naujoji Johnso Hopkinso ir Stanfordo technologija tampa įdomi tuo, kaip ji panaudoja imitacinį mokymąsi mokant robotus stebint, o ne aiškiai programuojant.
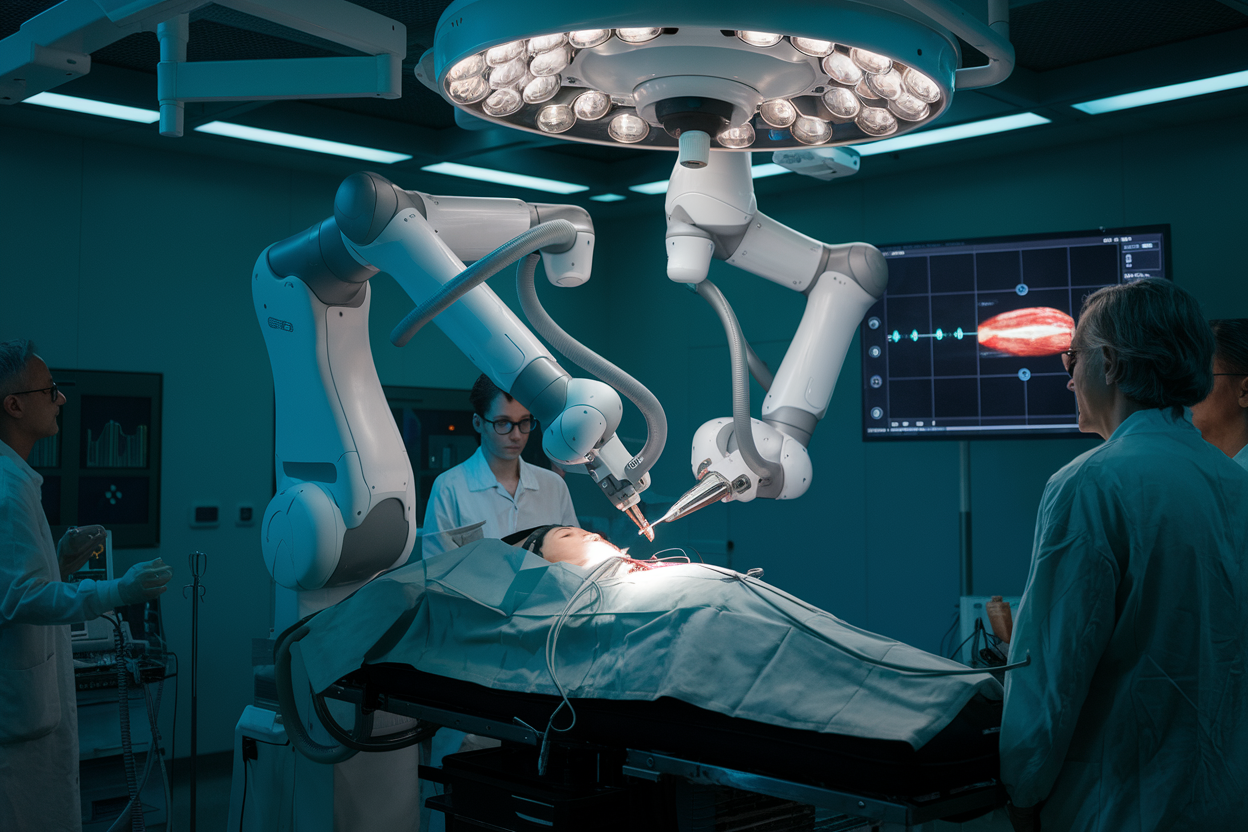
Mokslininkai įrengė savo esamą da Vinci chirurginę sistemą su mašininio mokymosi modeliu, galinčiu analizuoti chirurgines procedūras, užfiksuotas kameromis, sumontuotomis ant roboto instrumentų. Vaizdo įrašai, užfiksuoti realių operacijų metu, pateikia detalų vaizdinį ir kinematinį žmogaus chirurgų atliekamų užduočių vaizdą.
Kad apmokytų robotus, komanda naudojo gilaus mokymosi architektūrą, panašią į pažangių dirbtinio intelekto kalbos modelių, tačiau pritaikė ją chirurginiams duomenims apdoroti. Pritaikyta sistema analizuoja vaizdo įvestis kartu su judesio duomenimis, kad sužinotų tikslius judesius, reikalingus atliekant tokias užduotis kaip manipuliavimas adata, audinių tvarkymas ir susiuvimas.
Idėja yra ta, kad sutelkiant dėmesį į santykinius judesius – koreguojant pagal esamą roboto padėtį, o ne laikantis standžių, iš anksto nustatytų kelių – modelis įveikia da Vinci sistemos kinematikos tikslumo apribojimus.
Mimika yra vienas dalykas, tačiau modelis žengia toliau, įtraukdamas grįžtamojo ryšio mechanizmą, leidžiantį robotui įvertinti savo veiklą. Naudodama imituojamą aplinką, sistema gali palyginti savo veiksmus su idealiomis trajektorijomis, parodytomis mokomuosiuose vaizdo įrašuose, leisdama robotui tobulinti savo techniką ir pasiekti tikslumo bei miklumo lygį, prilygstantį patyrusiems chirurgams, be nuolatinės žmogaus priežiūros treniruočių metu. .
Siekiant užtikrinti, kad robotai galėtų apibendrinti savo įgūdžius, modelis taip pat buvo veikiamas įvairių chirurginių stilių, aplinkos ir užduočių. Pasak mokslininkų, šis metodas pagerina sistemos prisitaikymą, nes leidžia jai susidoroti su realių chirurginių procedūrų niuansais ir nenuspėjamumu, kurie gali labai skirtis priklausomai nuo paciento ir chirurgo.
„Savo darbe nebandome pakeisti chirurgo. Mes tiesiog norime palengvinti chirurgo reikalus“, – „Washington Post“ sakė tyrimui vadovavęs Johnso Hopkinso Whitingo inžinerijos mokyklos docentas Axelis Kriegeris. „Įsivaizduokite, ar norite pavargusio chirurgo, kur esate paskutinis dienos pacientas, o chirurgas yra labai išsekęs? O gal norite roboto, kuris atliktų dalį tos operacijos ir tikrai padėtų chirurgui?
Vaizdas: SiliconANGLE / Ideograma
Jūsų balsas už paramą mums yra svarbus ir padeda mums išlaikyti turinį NEMOKAMĄ.
Vienu spustelėjimu toliau palaikome mūsų misiją teikti nemokamą, išsamų ir aktualų turinį.
Prisijunkite prie mūsų bendruomenės „YouTube“.
Prisijunkite prie bendruomenės, kurią sudaro daugiau nei 15 000 #CubeAlumni ekspertų, įskaitant Amazon.com generalinį direktorių Andy Jassy, „Dell Technologies“ įkūrėją ir generalinį direktorių Michaelą Delą, „Intel“ generalinį direktorių Patą Gelsingerį ir daugybę kitų šviesuolių bei ekspertų.
AČIŪ